Im Kampf um die Gunst der Kunden findet man Aussagen zu den Antrieben wie „hochauflösende 16-Bit Schrittmotoren“, „flüsterleise 3 Phasen Schrittmotoren“ „Riemenantrieb durch Steppermotoren“ oder auch „C.C. Motor“. Gibt es denn Schrittmotoren, die 16 Bit haben? Benötigt man Drehstrom für den Betrieb von Dreiphasen-Schrittmotoren? Was bedeuten diese Werbebotschaften bzw. welche Information steckt für den Anwender dahinter? Arbeit für Don Quichotte„Manuelles Ausrichten eines Moving Heads …“ (Bild: Herbert Bernstädt)
Es gibt fast für jeden Anwendungszweck bestimmte Motorentypen, die besondere Eigenschaften für die gestellte Aufgabe aufweisen. Die Auswahl des richtigen Motors ist nicht nur eine Frage der Zielsetzung und des Preises, sondern auch der Lagerhaltung bzw. unterschiedlicher Techniken, die mit jedem verschiedenen Typ beherrscht und gewartet werden muss. Wenn es darum geht ein Prisma in verschiedenen Geschwindigkeiten rotieren zu lassen, dann genügt ein einfacher Gleichstrommotor, der in seiner Geschwindigkeit geregelt werden kann. Möchte man dagegen ein Gobo in einer bestimmten Richtung ausrichten, dann benötigt man einen Motor, den man zielgenau auf eine Position hinfahren lassen kann. Bei der Gobo-Ausrichtung möchte man dies idealerweise zudem ohne größeren Steuerungsaufwand bewerkstelligen. Deshalb sind dort Schrittmotoren die erste Wahl. Gilt es jedoch auf Positionen präzise auszurichten, ohne dass z. B. ein Reset bei jedem Einschalten des Geräts ein Ballett von Bewegungen im Bühnendach vollzieht, dann sind Servos die erste Wahl. Dennoch findet man in den meisten Geräten nur einen einzigen Motortypen. Aber wie kommen wir nun zu diesen Aussagen? Dazu betrachten wir die Motorentypen im Einzelnen.
Schrittmotor
Gleichstrommotor
Regelkreis
offen
geschlossen
Regelalgorithmus
einfach
hoch
Kosten
niedrig
hoch
Geschwindigkeit
mittel
hoch
Präzision
sehr hoch
hoch
Wirkungsgrad
niedrig
hoch
Ruhemoment
gut
schwach
Vergleich zwischen Schrittmotor und Gleichstrommotor
Eine der Hauptaufgaben eines Moving Lights ist es ein bestimmtes Gobo anzufahren, eine bestimmte Farbe in den Strahlengang zu schieben und den Scheinwerferkopf oder den Spiegel in eine bestimmte Richtung zu richten. Folglich ist eine der Hauptaufgaben die Positionierung. Da in einem Multieffektscheinwerfer sehr viele Funktionen mit jeweils einem eigenen Motor realisiert werden müssen, darf die Lösung zur Positionierung auch nicht sehr teuer sein. Zur Positionierung haben sich grundsätzlich zwei Typen herausgebildet. Einmal der Stepper bzw. Schrittmotor und zum anderen der C. C. Motor bzw. der continuous current, was so viel heißt wie Gleichstrommotor. Natürlich kann man den Schrittmotor auch in die große Familie der Gleichstrommotoren zählen, doch dazu später mehr. Der Hauptunterschied beider Typen ist, dass der Schrittmotor für das Anfahren einer bestimmten Position keine Weggeber benötigt, sondern einfach Steuerbefehlen folgt, um die gewünschte Endlage zu erreichen. Er erlaubt das präzise Anfahren einer Position ohne Weggeber. Man spricht bei der Ansteuerung ohne eine Rückmeldung über Weggeber auch von „open loop“, weil keine Rückmeldung erfolgt, wohin der Motor seine Last hinbewegt hat. Dem gegenüber stehen Servosysteme (Servo heißt eigentlich Sklave), die aufgrund eines Weggebers andauend bestrebt sind so nah wie möglich an das Ziel heranzufahren. Dabei ergeben die Zielvorgabe und die Differenz des Weggebers zum Ziel der Steuerung die Werte, um den Motor entsprechend zu treiben. Man spricht dabei von einem geschlossenen Regelkreis, einer „closed loop“. Servo bedeutet dabei eben Sklave vom Weggeber und dem Bestreben der Differenz zum Ziel zu null werden zu lassen. Welcher Motortyp aber in diesem Servosystem zum Einsatz kommt, ist nicht definiert. Oft ist es dann ein robuster und Drehmoment starker Gleichstrommotor, eben ein C.C. Motor. Dies darf nicht mit dem eigentlichen „Drehstrom Servomotor“ verwechselt werden, der im Prinzip ein bürstenloser Gleichstrommotor ist, dessen elektronische Kommutierung auf den Einsatz von verschleißbehafteten Kohlbürsten verzichten kann und kurz als EK-Motor bezeichnet wird. Aber hier stoppen wir kurz und beschäftigen uns im Folgenden nur mit den im Moving Light verwendeten Motorentypen.
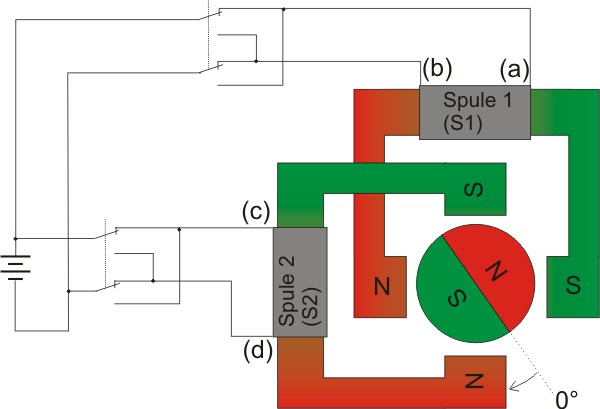
Ein Motor muss ein Drehmoment entwickeln, um etwas zu bewegen oder zu halten. Ein Drehmoment bei einem Elektromotor wird durch magnetische Kräfte erzeugt. Diese magnetischen Kräfte beruhen auf Anziehung und Abstoßung von Nord- und Südpolfeldern, wobei sich gleichpolige Felder abstoßen und gegenpolige Felder anziehen. Bei einem Motor nennt man den inneren Teil, der sich dreht, Läufer oder Rotor. Bei einem Schrittmotor besteht der Läufer aus einem Permanentmagnet, also einem Werkstoff, der magnetisch ist und diesen Magnetismus beibehält. Um nun eine Kraft zu erzeugen, wird ein Magnetfeld benötigt, das den Läufer bewegt. Der Läufer dreht sich immer so, dass sich der größtmögliche magnetische Fluss ausbildet. Dazu befinden sich bei einem Schrittmotor Gleichstromwicklungen im Stator. Stator ist die Bezeichnung der Magnetfeld-leitenden Anordnung, die den Läufer umgibt. Durch einen Gleichstrom wird in der Spule ein Magnetfeld erzeugt, welches durch Blechpakete geleitet auf den Permanentmagneten im Läufer wirkt. Nun stoßen sich die Felder ab bzw. ziehen sich an, bis der Läufer wieder die stabile Lage von Nord- zu Südpol erreicht hat.
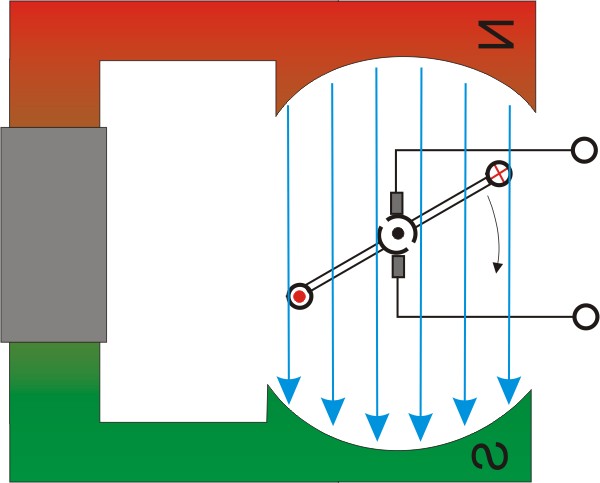
Betrachten wir das folgende Bild und die zugehörige Ansteuertabelle. Zum Zeitpunkt t1 hat sich der Läufer auf die Lage der Erregerpole ausgerichtet. Im nächsten Zeitschritt t2 wird der Strom in der Spule S2 umgedreht. Und Nord- und Südpol dieser Spule werden vertauscht. Der Läufer springt gleich um 90° weiter, da auf ihn die Summe beider Felder von Spule S1 und S2 wirkt und er damit auf die resultierenden Kräfte reagiert. Wird im nächsten Schritt t3, die andere Erregerspule umgepolt, dann springt der Motor wieder um 90° weiter. Dieses einfache Model erreicht also eine Schrittweite von 90° und benötigt vier Schritte für eine Umdrehung.
Das GrundprinzipImmer wenn eine Spule mit Strom durchflossen wird, richtet sich das Anker mit seinem Magnetfeld zum Spulen Magnetfeld aus.
Spule 1 (S1)
Spule 2 (S2)
Drehwinkel
Zeitpunkt
a
b
c
d
t1
–
+
–
+
0°
t2
–
+
+
–
90°
t3
+
–
+
–
180°
t4
+
–
–
+
270°
t5
–
+
–
+
360°
Steuertabelle
Der Schrittmotor läuft konstant auch bei Momentänderungen ohne Schwankungen, solange sein im Datenblatt angegebenes Drehmoment nicht überschritten wird. Darüber hinaus hält er auch im Stillstand sein Haltemoment und steht vollkommen ruhig. Man unterscheidet zwischen unipolarem Schrittmotor mit zwei Spulen mit Mittelabgriff, der mit einer Spannung auskommt und dem bipolaren Schrittmotor mit vier Spulen (4 oder auch 8 Anschlüsse), bei dem die Spannungen ständig umgepolt werden. Die Spulen des bipolaren Schrittmotors werden komplett ausgenutzt und haben bei gleicher Baugröße folglich ein höheres Drehmoment.
Kleinere Schritte sind zu erreichen, wenn man die Anzahl der Läuferpolpaare (Polpaarzahl) oder der Erregerwicklungen (Phasenzahl) vergrößert. Da eine Erhöhung der Phasenzahl auch den Schaltungs- und Verdrahtungsaufwand erhöht, legt man die Auflösung des Motors im Wesentlichen über die Polpaarzahl fest. 2-Phasenmotore mit einer Schrittweite von 0,9° und 1,8° sind am gängigsten. 5-polige Motoren mit einer Auflösung von 0,72° sind besonders für Microschritt geeignet. Dagegen sind 3-polige Schrittmotoren der ideale Kompromiss zwischen den beiden Varianten bzgl. Laufverhalten und Hardwareaufwand. Die gängigsten Schrittmotoren haben einen Rotor mit 50 Polpaaren und erreichen so eine Schrittauflösung von 1,8°/Schritt oder 200 Schritte/Umdrehung. Sendet man also 600 Impulse, dann dreht sich die Motorachse genau dreimal. Diese Schrittweite, die durch den mechanischen Aufbau des Schrittmotors bestimmt wird, bezeichnet man als Vollschritt. Aber nicht nur mit der geometrischen Anordnung kann man die Schrittweite verändern. Auch durch den Stromfluss der Spulen kann man anders ausgerichtete Felder resultieren lassen. So sind folgende Ansteuerungen, die meist in unserer Anwendungsklasse bereits als fertig aufgebaute ICs zur Verfügung stehen (Treiberbausteine), realisiert.
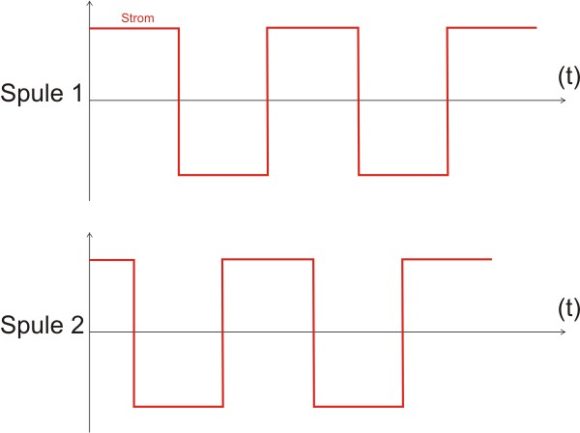
Normaler SchrittbetriebEs ergeben sich vier unterschiedliche Schrittpositionen pro Umlauf. (s. dazu auch obige Wertetabelle)
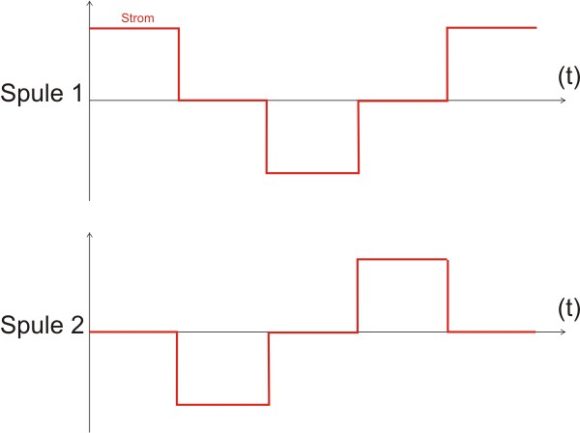
WaferbetriebHier wird immer nur eine Spule angesteuert. Die Leistungsaufnahme und damit auch das Drehmoment sind geringer. Die resultierenden vier Schrittpositionen liegen zwischen den „normalen“ Schritten.
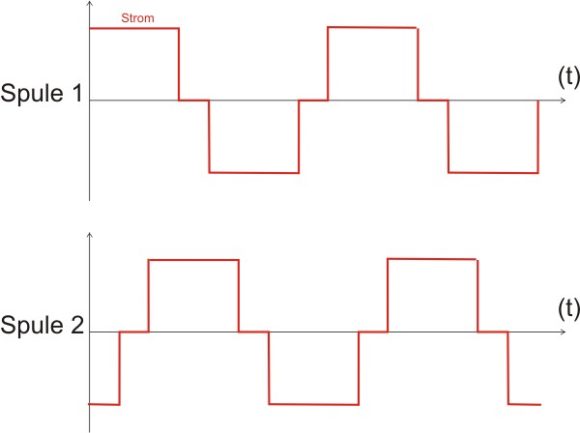
HalbschrittbetriebEs werden wechselweise eine bzw. zwei Spulen angesteuert. Es ergeben sich acht Schrittpositionen. Daher kommt die Bezeichnung Halbschritt, da der physikalische Schrittwinkel des Motors halbiert wird. Die Auflösung ist größer, dafür das Drehmoment kleiner.
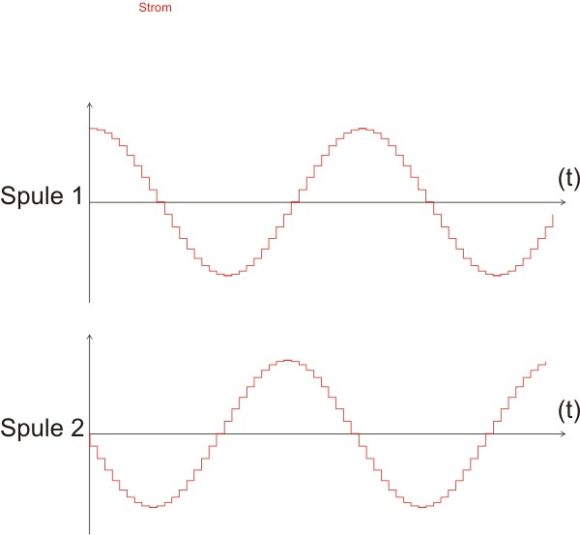
Microschrittbetrieb Im Microschrittbetrieb kann der natürliche Schrittwinkel des Motors in viel kleinere Winkel geteilt werden. Zum Beispiel hat ein Standard 1,8 -Motor 200 Schritte/Umdrehung. Wenn der Motor mit einem „divide-by-10“ Microschritt angesteuert wird, dann dreht jeder Mikro-Schritt den Motor um 0,18 Grad und es ergeben sich 2.000 Schritte/Umdrehung. Die Mikro-Schritte werden erzeugt, indem man den Strom in den zwei Wicklungen entsprechend einer Sinus- und Kosinus-Funktion fließen lässt.
Microschritte werden angewendet, wenn kein Lärm oder Vibration oder mehr Auflösung gefordert wird.
3-Phasen-Schrittmotoren liefern bei einem natürlichen Schrittwinkel von 1,2° ein vergleichsweise höheres Haltemoment als 2-Phasen-Schrittmotoren im „künstlichen“ Microsteppbetrieb. Ein ruhiger, vibrationsarmer Lauf kann hier bereits im Vollschrittbetrieb erreicht werden. Mit zunehmender Anzahl Phasen wird der Schrittwinkel kleiner und die Vibrationen nehmen ab. Der 3-Phasen-Schrittmotor bietet einen Mittelweg zwischen 2-Phasen-Schrittmotor (Standard) und 5-Phasen-Schrittmotor mit sehr kleinem Schrittwinkel und sehr geringen Vibrationen. Da Schrittmotoren einen Permanentmagneten beinhalten dürfen sie eine Gehäusetemperatur von +80°C nicht überschreiten, da der Verlust des Magnetismus beim Permanentmagneten droht.
Typischer Steppermotorin rechteckiger Form. Hier als Besonderheit ein mechanischer Reibwiderstand für weniger Zuckeln in der Bewegung. (Bild: Herbert Bernstädt)
Gleichstrommotoren (Continuous Current) entwickeln ein großes Anzugsmoment und erlauben eine stufenlose Drehzahlsteuerung. Auch hier wird der Effekt der Magnetfelder genutzt, aber hier bleibt das Feld im Stator bzw. Ständer konstant und kann auch durch Permanentmagneten erzeugt werden. Der Läufer, den man beim Gleichstrommotor auch Anker nennt, wird dagegen mit einer Spule ausgestattet, die ein Magnetfeld aufbaut, wodurch die abstoßenden und anziehenden Kräfte gegenüber dem Ständer auftreten und die Rotation einsetzt. Die Stromzuführung zum Anker wird über Schleifringe realisiert. Würde man diesen Motor so wie bisher beschrieben betreiben, so würde er nach einer halben Umdrehung einfach stehen bleiben, denn die Felder haben sich dann ausgerichtet. Man muss nun die Ankerwicklung mit umgekehrter Spannung versorgen, damit die Bewegung weitergeführt wird. Diese Umpolung des Ankers übernehmen Stromwender auf der Achse des Ankers. Wir kennen diesen Antrieb von jedem Akkuschrauber her.
Die Spule auf dem Läuferwird mit Gleichstrom durchflossen. Die Leiter mit ihrem Magnetfeld werden zum anderen Pol des statischen Magnetfeldes gezogen. Sind die Leiter dort angekommen, wird über Schleifkontakte am Läufer die Polarität umgedreht und es dreht sich wieder auf die andere Seite des Feldes weiter.
Der Gleichstrommotor ist wesentlich einfacher anzusteuern, da er keine Impulse wie der Schrittmotor benötigt. Aber die Positionierung mit solch einem Motor ist wesentlich aufwendiger, denn hier benötigt man zwingend einen Weggeber. Die Steuerung muss die Wegstrecke, die gerade zurückgelegt wird, auswerten und vor Erreichen des Ziels mit einem Bremsvorgang die Bewegung negativ beschleunigen. Somit ist ein Regelkreis (closed loop) für diesen Motor notwendig, wenn etwas auf Position gefahren werden soll. Soll dagegen einfach nur ein Prisma rotieren, welches nicht indexiert werden muss, so ist dieser Motor durchaus auch in der nicht geregelten (open loop) Einheit zu verwenden. Gleichstrommotoren sind sehr schnell und effektiv und je nach Regelung nur wenig ungenauer als Schrittmotoren. Wird aber ein wenig mehr Aufwand bei der Wegerfassung getrieben, wie z. B. bei einem Motorbügel, der einen Inkrementalgeber für die Geschwindigkeit und ein Potentiometer als Weggeber gleichzeitig einsetzt, so sind beachtliche Vorteile bei diesem Motorbügel zu sehen. Es sind sehr leise und gleichmäßige Bewegungen möglich und dies auch bei größeren, schwereren Lasten bzw. Scheinwerfern. Wird noch dazu ein Schneckengetriebe eingesetzt, so bleibt die Ausrichtung des Scheinwerfers auch erhalten, wenn die Stromversorgung des Motorbügels abgeschaltet wird. Zweckmäßigerweise kann mittels der Weggeber dann auch auf die typischen Resetbewegungen verzichtet werden, was gerade in einem Theater sehr gerne gesehen wird.
Einfache Gleichstrommotoren für einfache Drehaufgaben
Als V-L ihre Scheinwerfer nur vermieteten, konnte man die genauen Servo-Antriebe verwenden. Mit dem Verkauf von V-L Scheinwerfern für den freien Markt wurden alle Geräte, die für den Verkauf bestimmt sind, mit Steppermotoren ausgerüstet. Denn bei verkauften Geräten konnte nicht mehr sichergestellt werden, dass qualifiziertes Personal auch in der Lage ist einen Servomotor richtig einzustellen. Ein Schrittmotor benötigt keine Justierung mittels Oszilloskop.
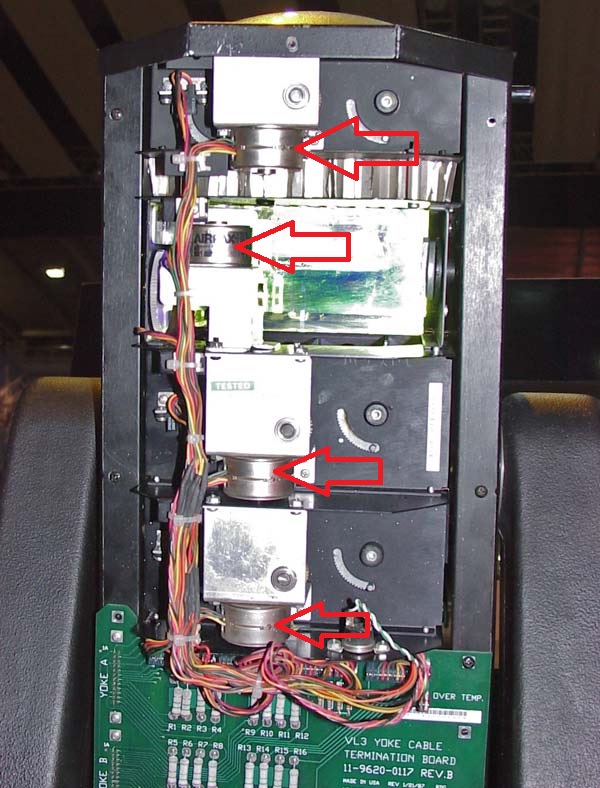
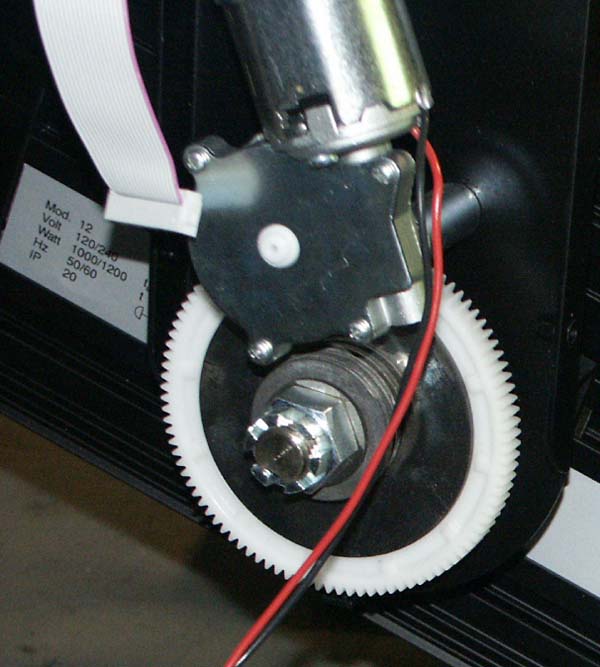
VL3 mit Servo-AntriebenVom Prinzip her ist ein Servoantrieb ein Gleichstrommotor mit einem Positionsgeber. Je nach Sollwert wird der Antrieb solange bestromt, bis die Steuerspannung genau so hoch ist wie beim Abgriff vom Positionsgeber.
Servo-Antrieb für MotorbügelBei diesem Bügel muss kein Reset mehr ausgeführt werden. Der Scheinwerfer bleibt auch nach dem erneuten Einschalten so ausgerichtet wie er beim Ausschalten war.
Nachdem wir die Wirkungsweise eines Schrittmotors kennen, fragen wir uns zu Recht, was ist ein 16-Bit-Schrittmotor? Gemeint ist hier nicht die Auflösung des Schrittmotors, sondern dass zwei DMX-Steuerkanäle zusammen einen Wertevorrat für die Positionierung liefern. Bekannterweise überträgt das DMX-512 Protokoll 512 Kreiswerte mit je 8 Bit Auflösung. 8 Bit Auflösung bedeutet aber auch, dass 256 verschiedene Werte angenommen werden können. Geht man von einem Kreis mit 360° aus, dann kann man den Kreis mit 8 Bit Auflösung in 1,4° aufteilen. Hat man dagegen einen Pan-Bereich von 540°, was heute üblich ist, dann kann man sich bei 8 Bit Steuersignal nur in 2,1°-Schritten bewegen. 2,1 Auflösung bei einer Projektionsentfernung, lassen wir es mal 15 m sein, ist nach der Geometrie: Kreissektor b ist gleich Pi mal r mal alpha geteilt durch 180°. Somit folgt hier eine Bewegung von Wert zu Wert um jeweils 55 cm über die Bühne. Das reicht für weiche Washstrahler, aber nicht für scharf projizierte Firmenlogos, die genau neben dem Bühnenportal aufprojiziert werden sollen. Aus diesem Grunde werden zwei DMX-Steuerkanäle zu einem Wertebereich zusammengeschlossen und somit erhält man einen Wertevorrat von 16 Bit, was immerhin 65.536 verschiedene Werte erlaubt. Somit wäre eine Auflösung theoretisch von 0,00823° möglich, was in unserem Beispiel nur noch ca. 2 mm bedeuten würde. Jedoch ist das Theorie und vernachlässigt die Praxis mit ihrem mechanischen Spiel und letztendlich die Ausführung der Steuerungselektronik im Moving Light selbst. So werden intern oftmals nur 11 Bit oder 12 Bit zur Positionsberechnung für die Schrittmotoren verwendet. Man kann dies nachprüfen, indem man auf dem Moving Head einen Laser platziert und dann den hoch auflösenden Wertevorrat (Pan fine) Bit für Bit inkrementiert und den Weg, der zurückgelegt wird, an der Wand markiert. Wenn dann erst alle 4 Bit ein Bewegungssprung erfolgt, erkennt man leicht, dass die Auflösung nicht mit 16 Bit erfolgt, sondern intern mit einer geringeren Auflösung gearbeitet wird.
Dabei muss man sagen, dass eine Auflösung von 12 Bit in aller Regel mehr als ausreichend ist. So ist aufgrund der mechanischen Toleranzen auch bei echten 16-Bit-Berechnungen praktisch eine Auflösung von ca. 0,01° real. Das Gleiche gilt natürlich dann auch für die Indexierung bzw. Ausrichtung von Gobos. Dabei wird oft der Wertebereich der Indexierung halbiert, da im oberen Wertebereich die Rotationsfunktion und deren Geschwindigkeiten definiert wird. So wäre dann zur Ausrichtung eines schräg auftreffenden Gobos bei einem Indexierungsvorrat von 540 Grad und verfügbarem Steuerungswertevorrat von 128 Bit eine Ausrichtung um 4,2 Grad möglich, was bei einer Gobobildgröße von 2 m einen Höhenunterschied von der linken zur rechten Seite von 14 cm bedeutet, wodurch klar wird, dass dieses Gerät nicht geeignet ist, ein Firmenlogo gerade an der Wand auszurichten, wenn die Projektion von schräg oben erfolgt, die Verzerrung hier mal vollkommen außer Betracht gelassen.
Einige Hersteller spendieren Ihrer Motorsteuerung auch einen Timingkanal oder den sogenannten Vector Mode. Damit kann man das Problem umgehen, wenn nur ein Pult zur Verfügung steht, dass nur 8-Bit-Überblendungen für Pan und Tilt erlaubt und somit zu grobe Treppenstufen liefert. Auch sind ältere Pulte oftmals mit der CPU-Rechenleistung bei großen Überblendvorgängen so beschäftigt, dass sie unregelmäßig die DMX-Werte aufgefrischt haben, was sich dann als zuckelnde Bewegung zeigte. Dies kann man mit diesem Vektorkanal umgehen, da dann direkt mit der Überblendzeit 0 am Pult auf das Ziel gefahren wird, aber mit der Geschwindigkeit, die am Vektorkanal gerade eingestellt wurde. Dann übernimmt der Scheinwerfer selbst die Berechnung der Fahrt und garantiert damit eine zuckelfreie Fahrt, die bestimmt höher aufgelöst ist als 8 Bit.
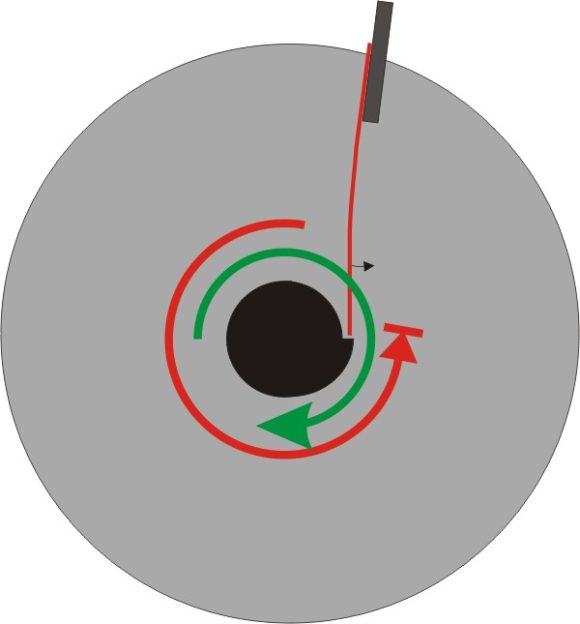
Wie wir jetzt wissen kann einem Schrittmotor genau gesagt werden wie weit er eine Bewegung durchführen soll. Jedoch wissen wir noch nicht wo der Ausgangspunkt der Bewegung sich gerade befindet. Jedes Mal, wenn ein Moving Light abgeschaltet ist, werden keine Positionswerte zwischengespeichert und der Motor kann an einer x-beliebigen Position stehen. Das Zwischenspeichern macht auch nicht ganz so viel Sinn, denn wenn aus irgendeinem Grund die Position einmal verloren gegangen ist, dann würde der gespeicherte Zwischenwert dafür sorgen, dass alle weiteren Bewegungsbefehle auf diesem fehlerbehafteten Offsetwert basieren und damit weiterhin das Ziel überfahren bzw. nicht erreicht wird. Aus diesem Grunde wird beim Einschalten eines Moving Lights ein Reset – bzw. eine Routine zur Definition der Ausgangspositionen – durchgeführt, um für alle Schrittmotoren eine definierte Position festzulegen. Das kann einmal sehr lange dauern und geräuschvoll ablaufen oder aber auch sehr schnell und beinahe geräuschlos. Die geräuschvolle Variante stammt aus der Urzeit der Moving Lights, ist allerdiengs auch heute noch oft vertreten. Man hatte dazu eine einfache, aber funktionale mechanische Lösung entwickelt. Man hat einem rotierbaren Rad, sagen wir mal Farbrad, in einer Drehrichtung unendliche Umdrehungen erlaubt, aber in der anderen Richtung einen Endanschlag eingebaut, so wie man es mit einem Federblech auf einer Schnecke realisiert werden kann. Bei den Pan- und Tilt-Aufgaben des Bügels sind die Endanschläge dagegen bereits vorgegeben, da ansonsten der Kopf unendlich durchdrehen könnte und damit die Kabel irgendwann schnell verdrillt abgerissen werden. Bei der einen Methode lässt man den Motor nach dem Einschalten des Moving Lights entgegen der betriebsbedingten Drehrichtung fahren, so dass er auf den Anschlag treffen muss. Somit bleibt er an diesem Anschlag stecken und kann nicht weiterdrehen. Man hat die Zeit bzw. den Weg für die Aufgabe so gewählt, dass er auf jeden Fall dort anschlagen muss und gibt meist noch ein wenig Reserve dazu. Dass der Motor gegen diesen mechanischen Widerstand arbeitet und dabei klappert und die mechanischen Vibrationen dabei Geräusche entwickeln, ist nachvollziehbar. Aber man weiß anschließend, dass sich der Motor nun an dieser Position befinden muss. Diese Methode belastet Motortreiber, Motor und auch die Mechanik.
Gesockelte Treiber Treiber-ICs sind meist gesockelt, da sie aufgrund der Ströme bei zu hoher Belastung oder Motorendefekt auch zerstört werden können. (Bild: Herbert Bernstädt)
Reset über Endanschlag (mechanisch)Einfacher aber wirkungsvoller mechanischer, drehrichtungsabhängiger Feder-Endanschlag
Man könnte aber auch einen Sensor oder einen Microschalter einsetzen, um das Erreichen einer bestimmten Position zu detektieren. Diese Methode wird immer mehr eingesetzt. Dabei finden oft Microschalter oder Hallsensoren Einsatz. Microschalter werden meist so platziert, dass sie als Kontaktgeber kurz vor dem mechanischen Endanschlag ein Schaltsignal geben und damit die Position „Erreicht“ an die Steuerungselektronik senden. Ideal sind für die Microschalter Pan und Tilt wie auch Kulissen-Farbwechselsysteme oder Zoom und Fokuslinsenfahrten, da sie endliche Anschläge aufweisen.
Endlage-Erkennungüber Microschalter (Bild: Herbert Bernstädt)
Tilt-Endschalterfür Endpositionen
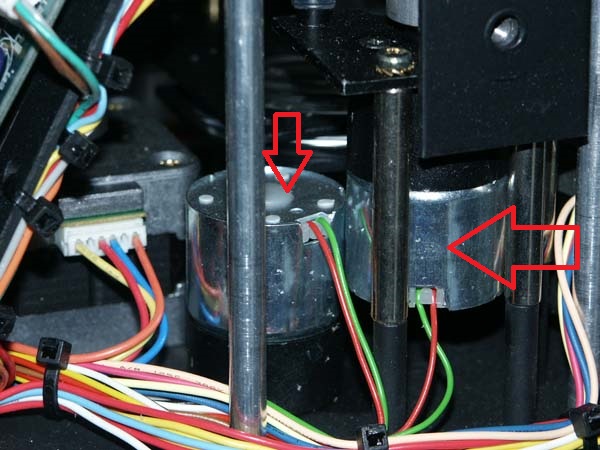
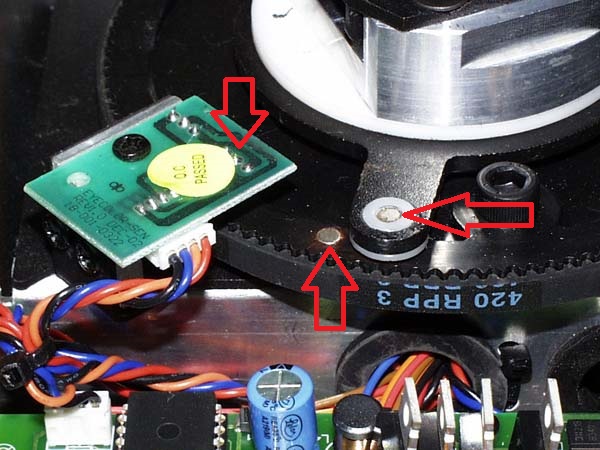
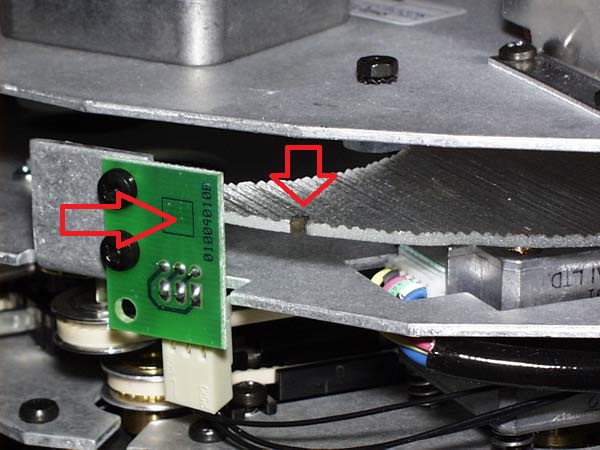
Rotierende Räder wie Gobos oder Farbräder müssen unendlich durchlaufen können und sind zudem meist so eng gepackt, dass dort ein Microschalter nur sehr aufwendig platziert werden kann. Die immer preiswerter werdende Serienelektronik erlaubt heute auch die breite Anwendung von Hallsensoren. Ein Hallsensor reagiert auf magnetische Felder und kann bei Vorhandensein eines Magnetfeldes mit der zugehörigen Auswertelektronik ein Signal senden. Damit ein rotierendes Rad einem Hallsensor ein Signal übermitteln kann, wird auf dem Rad ein kleiner Magnet eingelassen oder einfach aufgeklebt.
Endlage-Erkennung über HallsensorHallgenerator zur Pan-0-Punkt-Bestimmung: Der Magnet ist im oberen Anschlag eingelassen. Durch doppelte Anschlagsmechaniken, die ineinander greifen, ist ein Pan von über 360 möglich. Hier ist auch ein zweiter Magnet zu erkennen für den Anschlag in anderer Richtung
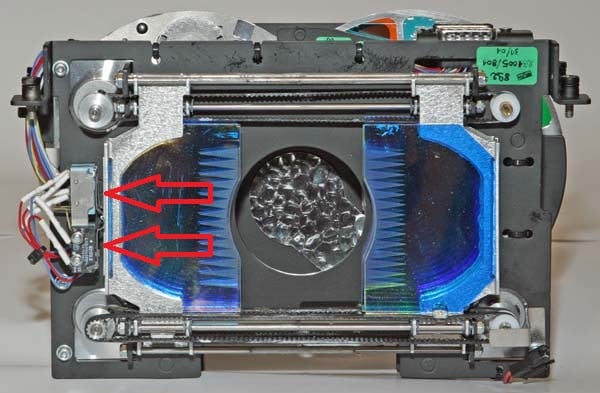
Der Magnetist in die strukturierte Frostscheibe eingelassen und wird von dem Hallgenerator auf der Platine erkannt
Der Vorteil dieser Sensorsignaltechnik ist, dass die Steuerungselektronik bei Signal den Motor stoppen kann und damit der Motor nicht „durchrutschen“ muss bzw. gegen ein von ihm nicht zu bewältigendes Drehmoment und somit im Überlastbereich arbeiten muss. Außerdem kann so ein Reset von der Durchführungszeit wesentlich kürzer verlaufen, denn er ist abgeschlossen, wenn der Motor den Sensorpunkt erreicht hat. Diese Methode erlaubt aber auch, dass während des Betriebes des Moving Lights von der Steuerungselektronik ein Reset durchgeführt werden kann. Dabei kann man auf einem DMX-Steuerkanal meist getrennt für Pan und Tilt bzw. den sonstigen Attributen ein Reset anfordern, wenn man als Operator eine Fehlfunktion oder das Verlieren der Ausgangsposition vermutet. Es gibt sogar Steuerungen, die im laufenden Betrieb kontinuierlich den Sensor abfragen und vergleichen ob dies mit den vorgegebenen Schritten zur Bewegung auch übereinstimmen kann und korrigiert evtl. dann automatisch eine auftretende Abweichung.
Betrachtet man die Indexierung von Goborädern, die zum Teil mit 2 mal 8 Bit in ihrer Ausrichtung definiert werden können, wobei die interne Elektronik je nach Modell dann nur noch mit 12 Bit oder anderen Datenwortgrößen arbeitet, so ist leicht nachzuvollziehen, dass für die präzise Ausrichtung eines Liniengobos bzw. Schriftzugs auch die Ausgangsposition von Mal zu Mal immer ganz genau angefahren bzw. gefunden werden muss. Benutzt man z. B. für den Endanschlag einen weichen Gummi, um die Anschlaggeräusche zu minimieren und den Impuls zu dämpfen, dann kann je nach „Tagesform“ der Gummi mal stärker eingedrückt werden wie beim letzten Mal und schon stimmt dann die Ausgangsposition auch nicht mehr. Der Operator quittiert diese Tatsache, dass er seine Presets mit anderen Positionswerten füttern muss. Nebenbei ist das auch einer der Hauptgründe, warum jede Cueliste auf Presets basieren sollte. So sind Positionserkennungsfehler oft auch darin begründet mit wie viel „Anlauf“ der Motor auf die Endposition zuläuft. Gute Auswertungen von Sensorpositionierung lassen die Antriebe mehrmals den Sensor anfahren, um damit immer genauer die Ausgangsposition definieren zu lassen.
Eine weitere Ungenauigkeit bei der Repositionierung, sei es nun vom Goborad oder einer Pan- oder Tilt-Bewegung, ist natürlich auch das mechanische Spiel. Auch hier gibt es qualitativ große Unterschiede und Lösungsansätze. In der Regel werden für Pan und Tilt gerne Riemenantriebe eingesetzt, aber auch Wellen mit Zahnrädern bzw. Getriebe haben ihren Einsatz bei der Ausrichtung des Scheinwerfers gefunden.
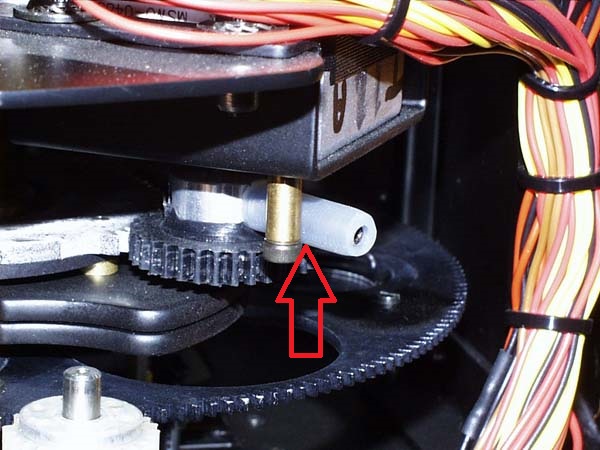
Direkte Kraftübertragung mittels SchneckengetriebeDank des dynamisch selbsthemmenden Schneckengetriebes erreicht das Gewicht des Scheinwerfers kein Verstellen der Position
Auch hier ist die Mechanik mit einem endlichen Spiel ausgestattet, das, wie soll es auch anders sein, immer einen umso höheren Preis hat je kleiner das Spiel ist. Aufgrund dieses mechanischen Spiels ist es nicht unerheblich, ob man einen Zielpunkt von der rechten oder linken Seite aus anfährt. Bei extremen Anforderungen achtet der Operator auch darauf, dass der Zielpunkt immer von der gleichen Seite aus angefahren wird, weil dadurch das Spiel der Mechanik meist die gleiche Fehlergröße aufweist als wenn er aus der anderen Richtung die Position anfährt.
Man spricht dabei auch von einer mechanischen Hysterese. Diese Eigenschaften lassen sich leider nicht in Werbebotschaften verpacken und deshalb gehört zu unseren Produkttests in der Testredaktion auch immer das Anfahren von bestimmten Positionen aus der einen wie der anderen Richtung, um die Abweichungen durch die mechanische Qualität festzustellen. Darüber hinaus wird der Prüfling mehrmals ab- und wieder eingeschaltet und dann wieder mit dem Goborad und deren Index oder anderen positionsrelevanten Funktionen, auf Position gefahren, um die Genauigkeit der Ausgangsposition beim Reset feststellen zu können.
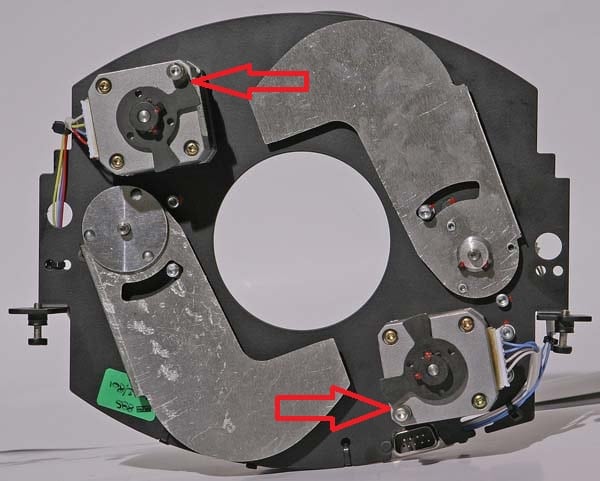
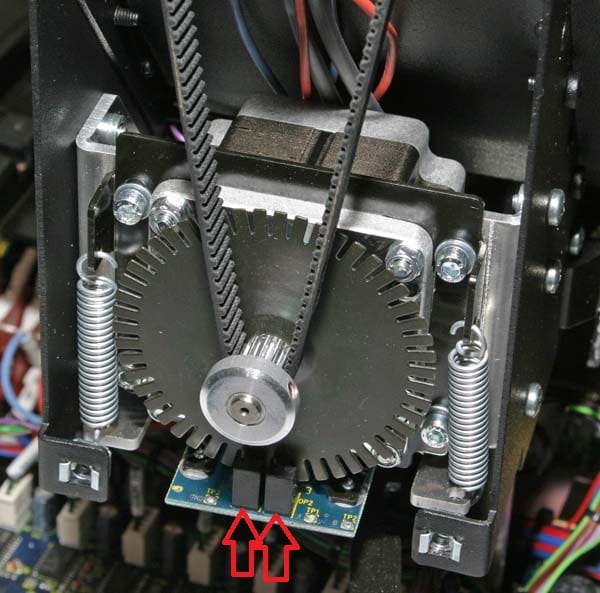
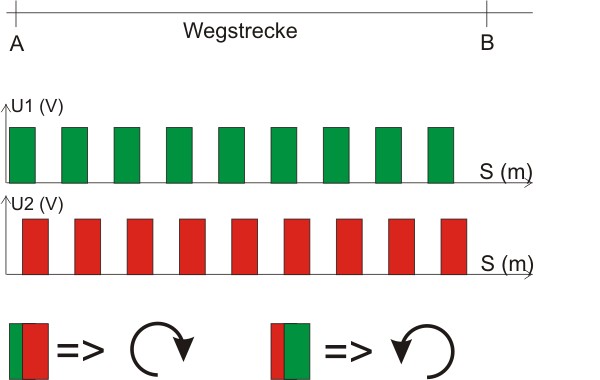
Befinden sich die Farb- und Goboräder wie auch der Zoom, Iris und Prisma im inneren des Multieffektscheinwerfers, so ist das Ausrichten des Scheinwerferkopfes bei einem Moving Head doch sehr einfach von äußeren Kräften zu bewerkstelligen. Dabei wird der Schrittmotor über die Mechanik und den Hebel der von außen angewandten Kraft, über seinen Haltemoment hinaus, einfach weitergedreht. Damit hat der Scheinwerferkopf seine Ausrichtung verloren. Da dies gerade bei Aufstellung auf der Bühne sehr schnell und häufiger auftreten kann, haben fast alle Hersteller, die Schrittmotoren für Pan und Tilt einsetzen, diesen Antrieben noch einen Weggeber spendiert. Dabei handelt es sich durch die Bank weg um Doppelgabellichtschranken, die einfach und preiswert zur Verfügung stehen. Wird nun der Kopf des Moving Heads bewegt, dann rotiert entsprechend mit der Bewegung ein auf die Mechanik gekoppeltes, meist gezahntes Rad. Bei aufwendigen Lösungen kann auch eine sehr hoch auflösende Weggeberscheibe mit ihrem Schwarzweißmuster direkt auf der Motorwelle sitzen und von der Abtastelektronik ausgewertet werden. Oftmals sind diese feinen Weggeber zum Schutz vor Staub und Schmutz mit dem Schrittmotor zusammen gekapselt, so dass sie beim ersten Anschein nicht als weggebende Motoren zu erkennen sind. Wird nun der Kopf bewegt, so kann eine Zählelektronik auswerten, wie weit der Kopf bewegt wird. Stimmt die Auslenkung mit einem DMX gegebenen Positionswert überein, so war es eine gewollte Bewegung. Ist die gezählte Position aber unterschiedlich zu der Position nach entsprechend vorgegebenen Werten der Schrittmotorensteuerung, so hat eine äußere Auslenkung stattgefunden. Die Steuerungselektronik gibt dann den Schrittmotoren so viele Schritte vor, die Position zu korrigieren wie die Lichtschranke an Schritten proportional an Auslenkung erfahren hat. Diese Lösung mit der Doppellichtschranke wird mal mehr oder weniger auflösend realisiert, so dass das Rückführen des Scheinwerferkopfes oftmals nicht exakt der Ursprungsausrichtung entspricht. Ist die Abweichung zu groß, so hilft dann nur noch ein Reset, um die Ursprungsposition wieder genau zu bestimmen. Jetzt können aufmerksame Leser aber anmerken, woran erkennt denn die Gabellichtschranke in welcher Richtung die Auslenkung erfolgt ist, denn die Steuerung muss ja entgegengesetzt einen Wegbefehl abgeben? Aus diesem Grund werden eben zwei Gabellichtschranken eingesetzt, die zueinander um 90° versetzt sind im Bezug zu den gezahnten Weggeberscheiben. Durch das leichte Versetzen der Sensoren erhält je nach Drehrichtung die Steuerungselektronik den ersten Impuls von der rechten Lichtschranke, gefolgt vom Impuls der zweiten Lichtschranke, während bei Umkehrung der Drehrichtung zuerst die zweite Lichtschrankengabel ihren Impuls liefert, sofort gefolgt von der ersten Lichtschranke. Somit kann die Steuerelektronik auch die Drehrichtung auswerten.
GabellichtschrankenUnten zu erkennen sind die zwei Gabellichtschranken mit der Weggeberscheibe für den Tilt-Antrieb (Bild: Herbert Bernstädt)
Zwei Gabellichtschrankenzur Erkennung von Rechts- oder Links-Auslenkung, ermöglicht durch einen leichten Versatz zu den Impulsen.
Steueralgorithmus bzw. mehr vom Ruckeln und Schwingen
Schnelle Bewegungen können die meisten gut, aber bei langsamen kann die Digitaltechnik ihre Tücken haben. Am häufigsten sind Treppenstufen zu beobachten oder ein periodisches Zucken gemäß zwei Schritte vor und einen zurück. Für einen Mond, der in einer 10-minütigen Szene unmerklich schräg über den Horizont wandern soll, ist ein Zucken (oder Treppenstufen, wie man es heute so schön ausdrückt) suboptimal. Bei unseren Tests stellen wir dann diese Szene mit einer Sequenz von zwei Positionen, die ca. 45° horizontal und vertikal auseinanderliegen, nach. Bei einer 16-Bit-Auflösung besteht die Strecke bei 45° Auslenkung und 560° Pan aus ca. 5.266 Einzelschritten. Bei einem Tilt-Bereich von 270° sind das immerhin schon 10.922 Einzelschritte. Geben wir dem Stellwerk eine Überblendzeit von 10 Minuten vor, dann berechnet das Stellwerk pro Sekunde ca. 9 Bit-Schritte vorwärts für Pan und 18 Bit-Schritte für Tilt. Bei einer DMX-Refreshrate von 25 Hz wird so nur maximal 1 Bit weitergesprungen von DMX-Strang zu DMX-Strang. Bei der zweiten langsamen Fahrt verringern wir die Überblendzeit auf 120 Sekunden, so dass 44 Bit in Pan-Richtung pro Sekunde bewegt werden müssen und in Tilt-Richtung sind es immerhin noch 91 Bit. Bei der DMX-Refreshrate von 44,11 Hz wird so sichergestellt, dass sich mindestens 1 Bit pro DMX-Datenpaket ändert und somit der Elektronik des Moving Lights abverlangt wird, kontinuierlich Schritt für Schritt neu zu berechnen und zu interpolieren, falls der Algorithmus dies vorsieht. Wenn nun das Moving Light Probleme hat sich ruckelfrei zu bewegen, müssten wir das erkennen können. Auch diese Prozedur muss man natürlich mit den einzelnen Pan-Tilt Fahrmodi wiederholen, wenn sie vorhanden sind. Das Vorhandensein von verschiedenen Fahrmodi ist aber meist auch schon ein Zeichen dafür, dass das Moving Light nicht schnell präzise und gleichmäßig langsam fahren kann, sondern dass man sich entscheiden muss, was am wichtigsten für einen ist, was eigentlich schon einen Kompromiss darstellt. Grundvoraussetzung ist natürlich die Gewissheit, dass das Lichtstellpult auch in der Lage ist kontinuierlich DMX-Stränge, ohne selber Pausen einlegen zu müssen, ausgeben kann.
Um die Positionierbarkeit zu überprüfen, ist es ratsam, das Moving Light auf einen festen Untergrund rutschfest zu stellen, denn die schnelle Beschleunigung der Antriebe kann durchaus das Basement verrücken. Einige Anwender bevorzugen Moving Lights, die sich durch ihre Ausbalanciertheit und ruckfreie sanfte Beschleunigungen auszeichnen. Denn die Beschleunigungskräfte wirken sich auf das Basement aus und werden an frei hängende Zugstange oder Traverse weitergeleitet, die dann ins ungewollte Schwingen kommt. Überprüft man dagegen die Positionsgenauigkeit des auf dem Boden stehenden Moving Light, so hat es sich gezeigt, dass man ein Verrücken des Basements am einfachsten erkennt, wenn man am Basement einen Laser montiert und den Auftreffpunkt an der Wand markiert. Sollte dann bei den Bewegungsabläufen dieser Punkt verlassen werden, sind die Ergebnisse als ungenau zu werten.
Unter dem Unterpunkt „Funktionen“ finden die praktischen Tests am Moving Light statt. Ist die Gradzahl des Bewegungsradius für Pan und Tilt meist noch aus der Bedienungsanleitung herauszulesen, so findet man bei der Auflösung der Pan- und Tilt-Werte die Standardangabe 16 Bit, was aber den Ansteuerungswertebereich wiedergibt, jedoch meist nicht die tatsächliche Auflösung von Betriebssoftware, Treiberelektronik und Schrittmotor. Hier müssen wir selber Messen.
Dazu platzieren wir bei einem Wash einen Laser am Kopf, während bei einem Spot das Aufrufen eines kantigen Gobos ausreicht. Der Laserpointer wird am besten mit Kabelbindern fixiert, damit auch ja kein Spiel zwischen Pointer und Kopf auftreten kann. Dann benötigt man einige Meter Abstand zu einer Projektionswand. Ein aufgespanntes Blatt Papier, das man getrost bemalen kann, dient zum Anzeichnen einer Ausgangsposition. Wichtig hierbei ist, dass diese Position immer aus einer definierten „Vorgänger“-Position herangefahren wird, denn das mechanische Spiel sorgt dafür, dass bereits Unterschiede zu erkennen sind ob man von rechts oder von links einen Punkt anfährt. Aber wenn man absolute Präzision benötigt, ist es kein Problem immer von der gleichen „Vorgänger“-Position die Endposition anzufahren. Dann benötigt man einen DMX-Generator, egal ob Testgerät, PC-Applikation oder Lichtstellpult, der aber in der Lage sein muss Byte und Fine Byte separat einstellen zu können. Nun kann man sich Bit für Bit vorbewegen und die Auslenkung beobachten. Man wird feststellen, dass eine Bewegung am Moving Light erst nach 16 Bitschritten erfolgen. Somit erfolgt die interne Steuerung nicht mit 16 Bit, sondern mit 12 Bit.
Nach der gleichen Methode wird auch die Repositionierung der Pan- und Tilt-Motoren getestet. Man markiert den Laserpunkt oder die Goboecke und lenkt mechanisch den Kopf weg und schaut sich an wie gut er zurückfindet. Aber auch hier führt die Auslenkung in die Richtung, aus der die Position angefahren wurde, zu einem besseren Ergebnis. Da man vorher die Bitauflösung für Pan und Tilt untersucht hat kann man hier oft ein Bit Abweichung bei der Repositionierung feststellen. Dies sollte mindestens fünfmal, besser 10-mal wiederholt werden, denn man wird oft eine Streuung um den angefahrenen Zielpunkt feststellen. Für den Praktiker bedeutet dies aber nur, ob er mit der Abweichung leben kann, die gemäß der Trigonometrie immer größer wird, je weiter sein Projektionsabstand ist. Für eine Techno-Party ist das sowieso irrelevant. Aber auch das Ein- und Ausschalten des Moving Lights sollte bei der Positionsbestimmung auf jeden Fall erfolgen, denn oftmals ist die Nullpunkterkennung bei einem Reset durch das mechanische Spiel, insbesondere wenn auf einen Anschlag gefahren wird, mit wesentlich höheren Streuungen behaftet. Das ist beim Rock’n’Roll, wo jeden Tag neu aufgebaut wird und neue Presets angelegt werden, unerheblich, aber bei einer Festinstallation, wie einem Themenpark, doch ein Thema. Weist das Moving Light verschiedene Pan-Tilt-Modi wie z. B. Speed-optimiert, präzisionsoptimiert oder geräuschoptimiert auf, dann muss man natürlich diesen Test für jeden Modus durchführen. Wobei gerade das Ein- und Ausschalten des Moving Lights dann durch den Reset zu einem sehr zeitaufwendigen Faktor wird.
Nach dem gleichen Prinzip wird auch die Indexierung der Goboräder überprüft, denn auch hier können konstruktionsbedingt verschiedene Fehlerquellen auftreten. Ist z. B. das Gobo nur mit einem locker anliegenden Sprengring im rotierenden Goborad befestigt, können zwischenzeitliche schnelle Goborotationen mit Drehrichtungswechsel dafür sorgen, dass das Gobo durchrutscht und somit der zu projizierende Schriftzug verdreht dargestellt wird. So hat es sich bewährt, das Gobo im Goborad zwischenzeitlich mehrmals bei höchster Geschwindigkeit mit schnellen Wechseln hin und her rotieren zu lassen. Auch hier sind mehrere Durchläufe notwendig, da das provozierte Durchrutschen des Gobos vielleicht erst beim 6. Mal auftritt. Natürlich sollte auch Ein- und Ausschalten dazwischen erfolgen, um die Reset-(Un-)Genauigkeit erkennen zu können.
Es sind Moving Lights auf dem Markt, deren Goboaufnahmen mit einer Führungsnase ausgeführt sind. Damit ist nicht nur ein Verdrehen des Gobos ausgeschlossen. Der große Vorteil von einer definierten Goboausrichtung in der Goboaufnahme erfolgt bei Anwendung mehrerer Spots gleichzeitig mit den gleichen Gobos. Möchte man z. B. den Horizont mit waagerechten Breakup Gobos strukturieren, muss die Ausrichtung des Gobos zur Waagerechten hin nicht bei jedem Moving light separat erfolgen, sondern kann auf allen beteiligten Moving Lights gemeinsam erfolgen, da die Ausrichtung des Gobos bei allen Moving Lights dem gleichen DMX-Stellwert folgt.
Zur Markierung dienende GobokanteEs gibt verschiedene Szenarien zum Abprüfen: Rotieren des Gobos – repositionieren. Wechseln des Gobos -repositionieren. Wechseln des Goborades – repositionieren. Dann kann dies einmal von der einen und aus der anderen Richtung kommend ausgetestet werden. Oder man kann nach ein- und ausschalten des Gerätes nochmal testen, wenn sich die Antriebe neu repositioniert haben. Natürlich kann man somit auch die Pan-Tilt-Repositionierung austesten.
Exakt perfekte Ausrichtung
Abweichung bei erneutem Anfahren der PositionTypischer “1-Bit” Fehler. Der darf bei Wiederholungen nicht wandern, ansonsten stimmt der Zählalgorithmus nicht.
Pan-EinheitKleinserien werden mit der Hand gefertigt (Bild: Herbert Bernstädt)
Literatur:
Technologie für energietechnische Elektroberufe, Verlag Gehlen
Fachkunde Elektrotechnik, Europa Lehrmittel
Schrittmotor Antriebe, Friedrich Prautsch
Mehr Thema Movinglights werden auf folgenden Seiten behandelt: